

Ardupilot is the leading pilot system, it is widely supported by many flying control boards. Also, fixed-wing, copter, rover are all functional in this system, so we could create plenty of nice little DIY projects.
However, currently most of the control boards are MCU based, limited computing power, memory becomes insufficient. Our idea is to run ardupilot on AP, with modern Linux system. Thus, much more open source projects could be utilized together with ardupilot, its future would be far more bright than MCU lines.
These days, we forked ardupilot open source project from upstream, added the support for our prototype, unbelievable, just a few hours of efforts, the system is up and running!
APM Planner GCS connected
MPU6050 attached to I2C, seems we could improve the I2C performance.
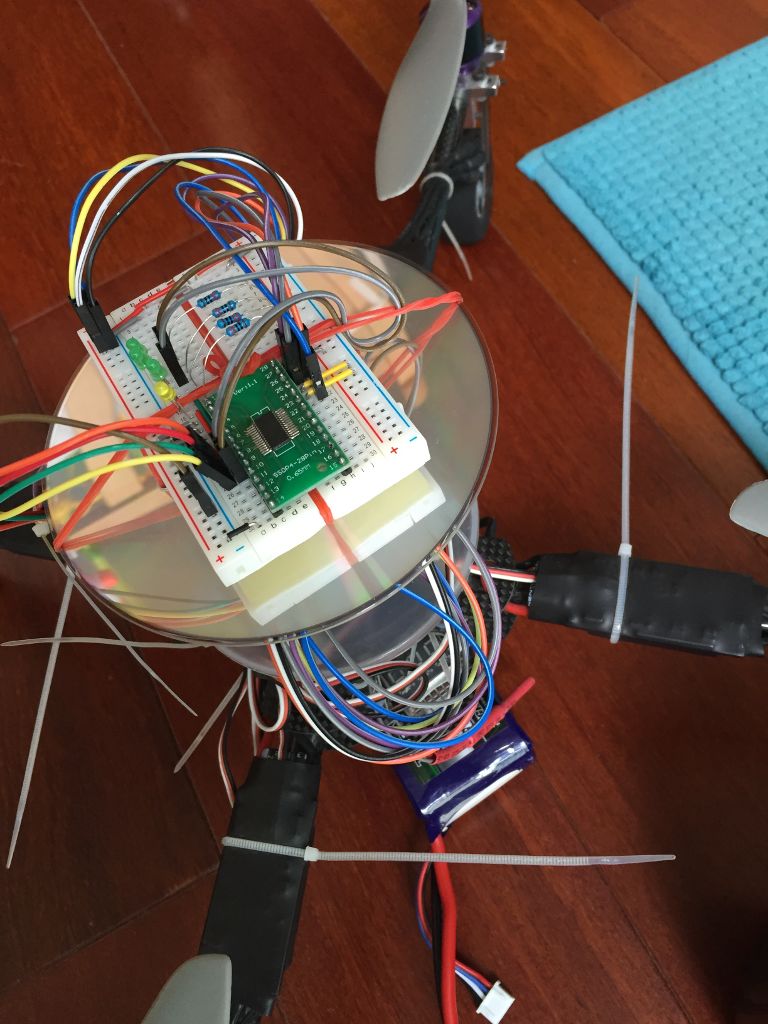
Ardupilot system controlling single ESC
Only one ESC single ware was connected, just precaution!
Stabilization mode on single ESC
See, ardupilot stabilization mode is on:)